略
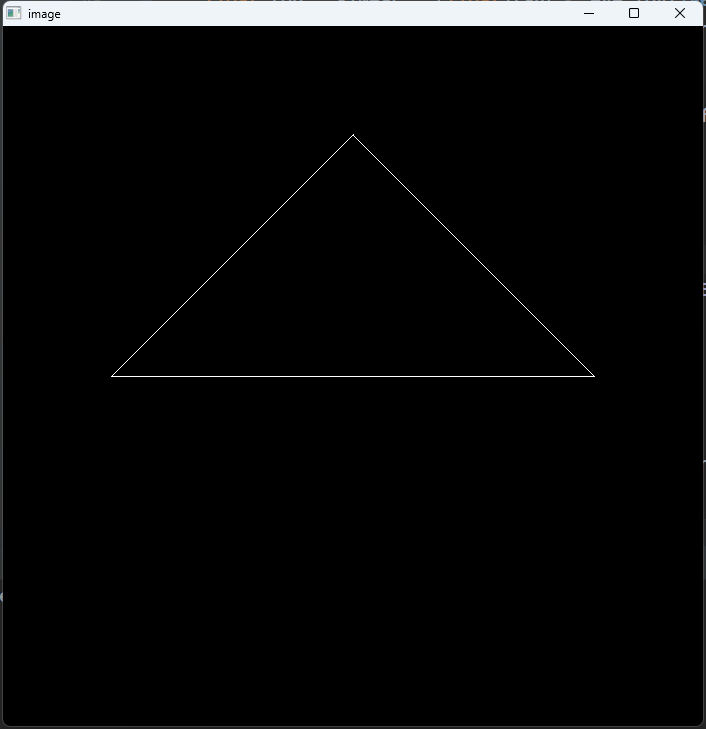
旋转
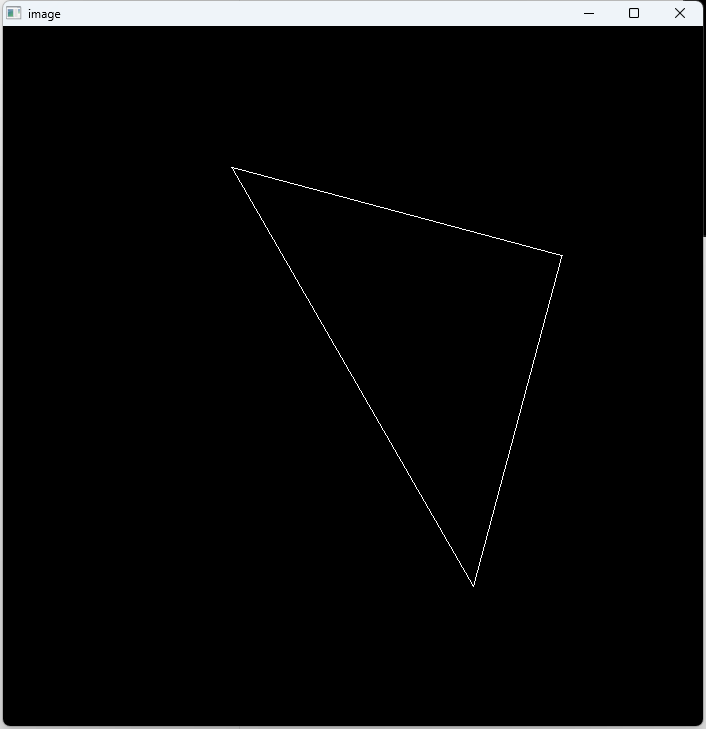
绕任意轴旋转(0, 0, 1), 注意旋转角度不能过大,否则三角形超出屏幕外frame_buf会越界
2*2 Super Sampling Anti-Aliasing
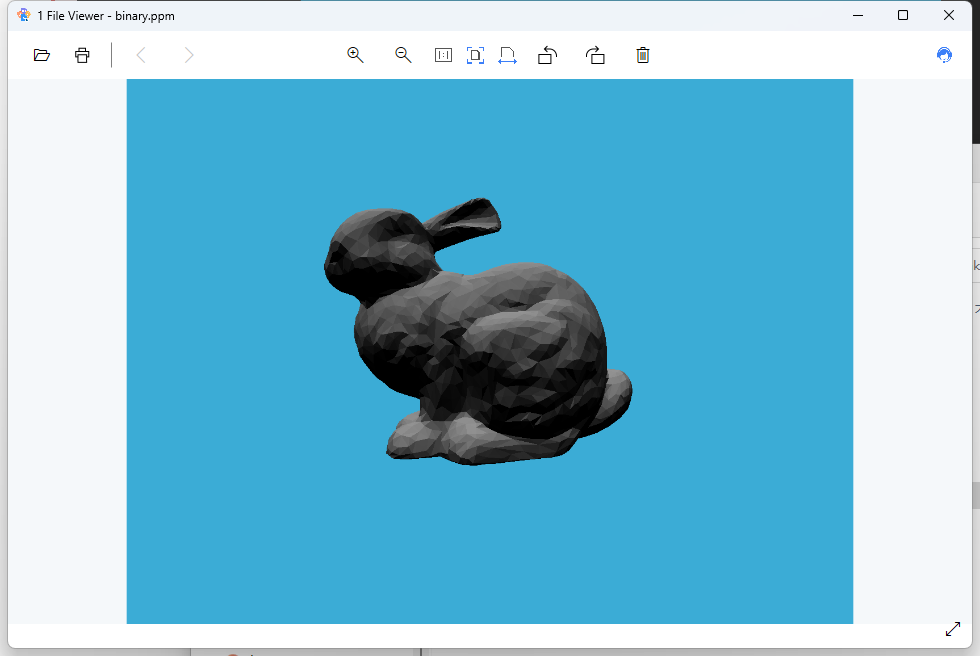
Normal模型
- BaryCentric Coordinates Interpolation

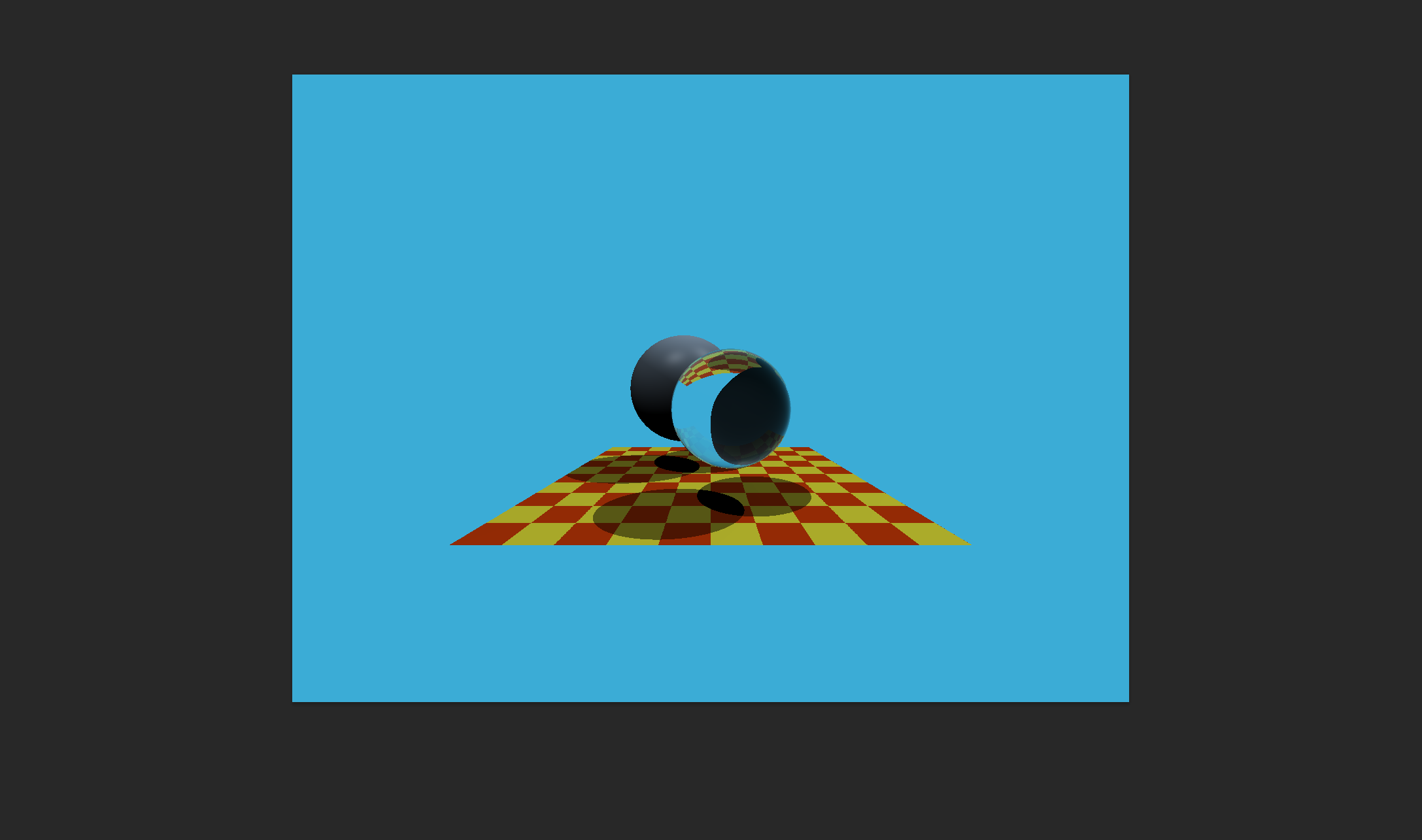
Blinn-Phong模型
- 计算光照 Specular, Diffuse, Ambient

Blinn-Phong模型 + Texture
- Texture mapping

Bump mapping

Displacement mapping

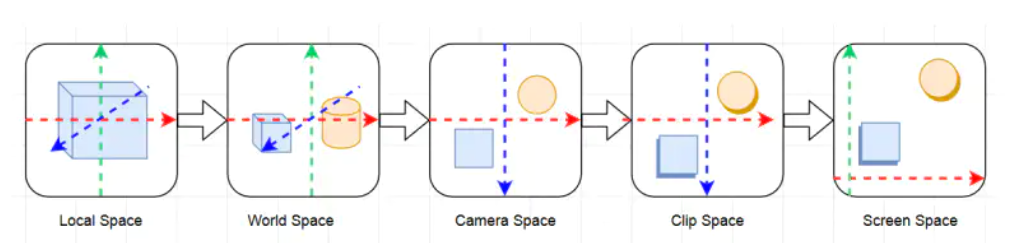
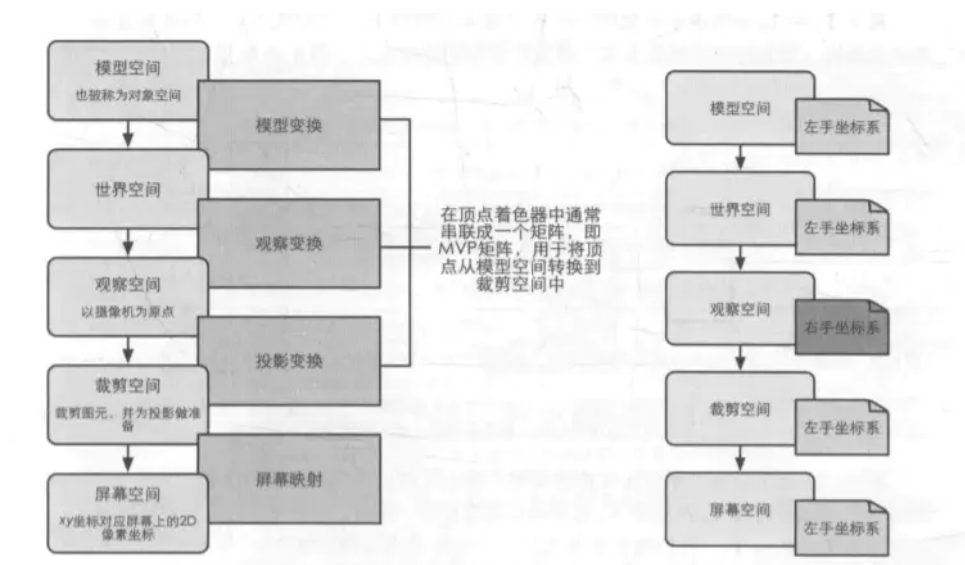
Model Space$\stackrel{model\ transformation}\longrightarrow$World Space$\stackrel{view\ transformation}\longrightarrow$View Space$\stackrel{projection\ transformation}\longrightarrow$Clip Space$\stackrel{screen\ mapping}\longrightarrow$Screen Space
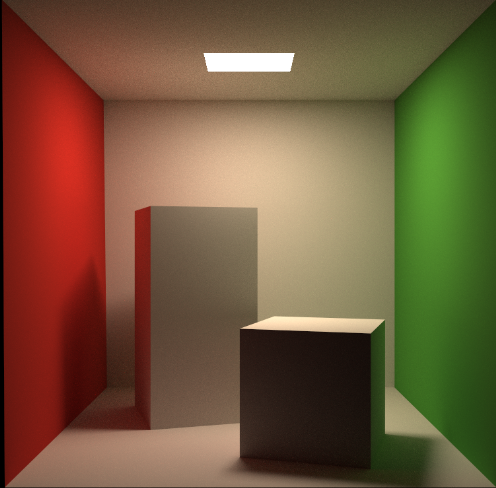
spp = 1024
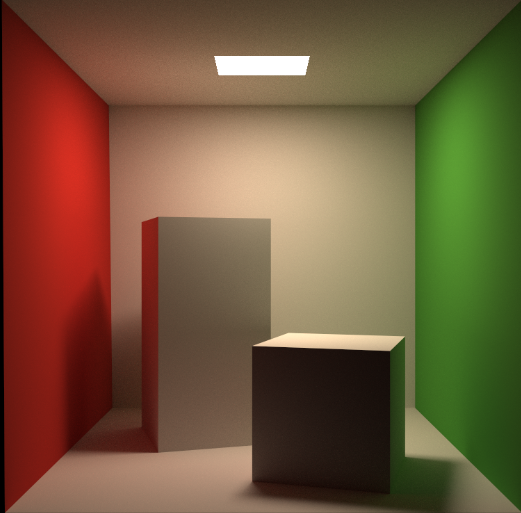
spp = 2048